Research
December 13, 2022Research Topics
At present, my research focuses on Brain-Inspired Navigation for Swarm Robotics, where the state-of-the-art brain inspired spatial cognition, navigation and decision-making models for swarm robots are proposed and are being implemented on the neuromorphic chips.
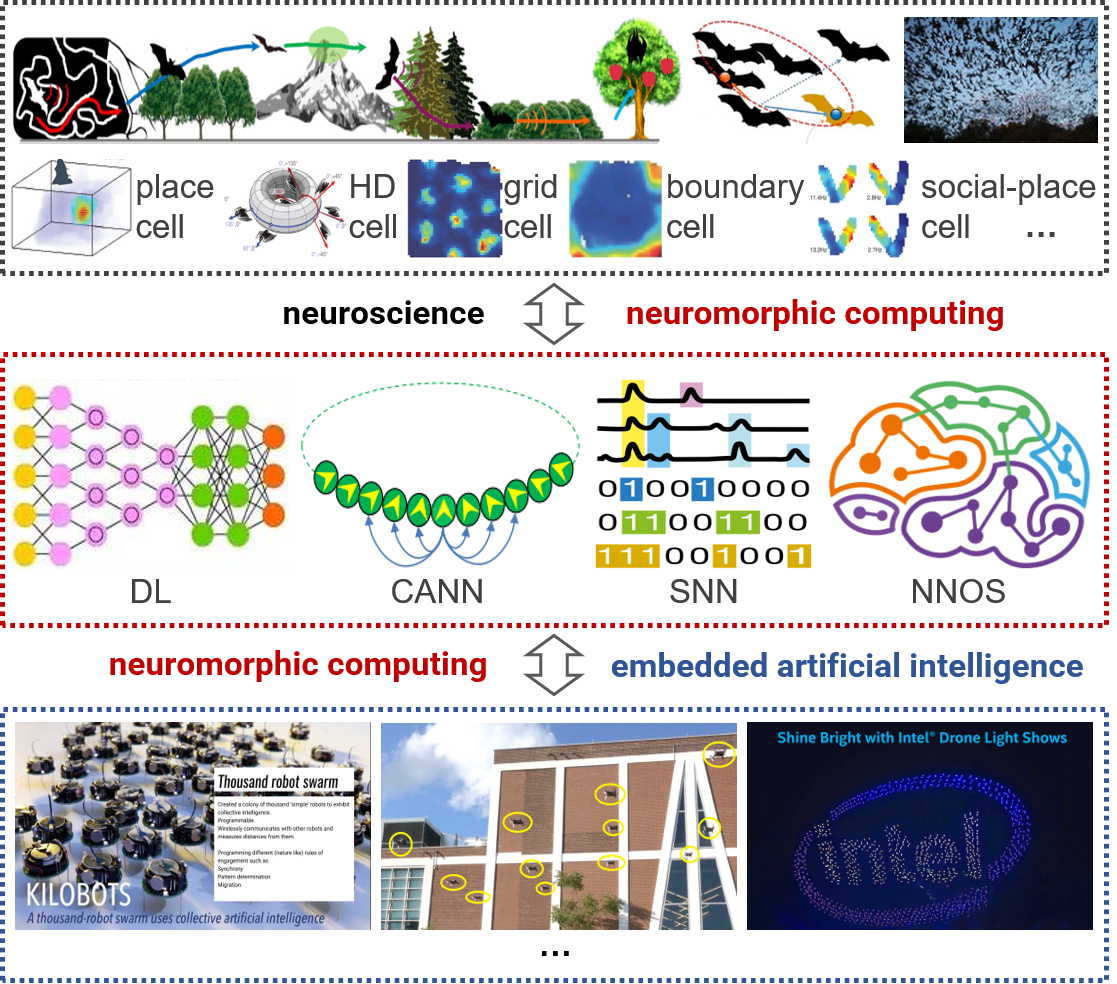
Revolving these goals, I have developed a set of brain-inspired swarm navigation models, including:
- Brain-inspired 3D large-scale Navigation
- Brain-inspired Relative Navigation
- Brain-inspired Cooperative Navigation
Currently, I am working on the following topics:
- Brain-inspired Self-organizing Swarm Perception and Decision-making
- Neuromorphic Autonomous System
Research Project
- NeuromorphicSWARM: The research goal is to advance swarm intelligence by engineering neural basis of swarm perception, awareness and navigation to build socially Neuromorphic Robot Swarms that can navigate in 3D space as social animals do, and can understand, reason about, and interact with each other as well as humans in real-world settings.
